TL;DR#
一个 8 行的 matmul → rms_norm → softmax → matmul 函数,经过 TPU 编译器的 71 轮 HLO pass 和 78 轮 LLO pass,最终变成 ~250 条 VLIW bundles。本文追踪了这个过程中的每一层:
- HLO 优化:代数化简、Layout 从行优先转为 Tiling、多个 elementwise op 融合成单个 fusion kernel
- LLO 生成:一条 HLO dot 指令展开为 MXU 的
vmatpush/vmatres指令序列,reduction 变成vperm+vadd的 tree reduction - VLIW 打包:MXU、VPU、XLU、DMA 等通道的指令被调度进同一个 bundle 并行执行
TPU 编译器从 HLO 开始就是闭源的(libtpu),Google 公开的资料极少。本文参考了 From JAX to VLIW: Tracing a Computation 并补充了一些细节。
名词解释#
- VLIW (Very Long Instruction Word) — 超长指令字
- IR (Intermediate Representation) — 编译器中间表示
- XLA (Accelerated Linear Algebra) — Google 开源的 ML 编译器
- LLVM — 编译器组件及工具链, 包含了编译器前端和后端
- HLO (High Level Operations) — 类似 Python 中的 FX IR
- LLO (Low Level Operations) — 类似 GPU 上的 PTX
- SSA (Static Single Assignment) — 静态单赋值
展开:SSA 的核心概念
核心规则:每个变量只被赋值一次。
对比理解
# 非 SSA(普通代码,变量可以反复赋值)
x = 1
x = x + 2
x = x * 3
# SSA(每次赋值产生新变量)
x1 = 1
x2 = x1 + 2
x3 = x2 * 3在 HLO 中的体现
mini_attention dump 出来的 HLO 就是 SSA 形式:
%dot.0 = f32[16,64] dot(%arg0, %arg1) ← 每个 %名字 只出现在等号左边一次
%mul.1 = f32[16,64] multiply(%dot.0, %dot.0)
%reduce.2 = f32[16,1] reduce(%mul.1, ...)
%sqrt.3 = f32[16,1] sqrt(%reduce.2)
%div.4 = f32[16,64] divide(%dot.0, %sqrt.3)没有任何变量被重新赋值。%dot.0 定义一次,后续只被读取。
为什么编译器都用 SSA
因为它让优化 pass 的分析变得极其简单:
- 数据流追踪:看到
%div.4,顺着定义链往上走,一定能找到唯一的来源 - 死代码消除:如果一个
%名字没有被任何其他指令引用 → 直接删掉 - 公共子表达式消除:两个指令产生相同结果 → 合并成一个
几乎所有现代编译器 IR 都是 SSA:LLVM IR、HLO、Triton IR、MLIR 的各种 dialect。
Insight:HLO 的 SSA 图结构意味着每个值只定义一次,计算之间的依赖关系构成一个有向无环图(DAG)。这种结构让编译器可以自由调整执行顺序——只要尊重数据依赖,把独立的计算并行化、把相邻的计算融合,都很自然。
示例代码#
import os
# Create dump directories
DUMP_ROOT = "compiler_dump/"
HLO_DUMP_PATH = os.path.join(DUMP_ROOT, "hlo")
LLO_DUMP_PATH = os.path.join(DUMP_ROOT, "llo")
os.makedirs(HLO_DUMP_PATH, exist_ok=True)
os.makedirs(LLO_DUMP_PATH, exist_ok=True)
os.environ["XLA_FLAGS"] = (
f"--xla_dump_hlo_as_text "
f"--xla_dump_to={HLO_DUMP_PATH} "
f"--xla_dump_hlo_pass_re=.* "
)
os.environ["LIBTPU_INIT_ARGS"] = (
f"--xla_jf_dump_to={LLO_DUMP_PATH} "
f"--xla_jf_dump_hlo_text=true "
f"--xla_jf_dump_llo_text=true "
f"--xla_jf_dump_llo_html=false "
f"--xla_jf_dump_llo_static_gaps=true "
f"--xla_jf_emit_annotations=true "
f"--xla_jf_debug_level=2"
)
# Import JAX after setting env vars
import jax
import jax.numpy as jnp
@jax.named_call
def matmul_1(x, w1):
"""Stage 1: Linear projection (like Q @ K^T)"""
return x @ w1
@jax.named_call
def rms_norm(h):
"""Stage 2: RMS Normalization"""
rms = jnp.sqrt(jnp.mean(h ** 2, axis=-1, keepdims=True) + 1e-6)
return h / rms
@jax.named_call
def softmax(h):
"""Stage 3: Softmax (row-wise, numerically stable)"""
h_max = jnp.max(h, axis=-1, keepdims=True)
exp_h = jnp.exp(h - h_max)
return exp_h / jnp.sum(exp_h, axis=-1, keepdims=True)
@jax.named_call
def matmul_2(h, w2):
"""Stage 4: Output projection (like attention @ V)"""
return h @ w2
def mini_attention(x, w1, w2):
"""
A minimal attention-like block:
matmul → rms_norm → softmax → matmul
"""
h = matmul_1(x, w1)
h = rms_norm(h)
h = softmax(h)
out = matmul_2(h, w2)
return out
def main():
# Small shapes to keep IR readable
batch, d_in, d_mid, d_out = 16, 64, 64, 32
# Create inputs
key = jax.random.PRNGKey(42)
k1, k2, k3 = jax.random.split(key, 3)
x = jax.random.normal(k1, (batch, d_in))
w1 = jax.random.normal(k2, (d_in, d_mid)) * 0.02
w2 = jax.random.normal(k3, (d_mid, d_out)) * 0.02
# JIT compile and run
jitted_fn = jax.jit(mini_attention)
# First call triggers compilation (and IR dump)
result = jitted_fn(x, w1, w2)
# Block until computation is done
result.block_until_ready()
print(f"Input shape: {x.shape}")
print(f"Output shape: {result.shape}")
print(f"Output sample: {result[0, :5]}")
print(f"\nDumps written to:")
print(f" HLO: {HLO_DUMP_PATH}")
print(f" LLO: {LLO_DUMP_PATH}")
if __name__ == "__main__":
main()代码非常简洁,一共四个操作:matmul_1 → rms_norm → softmax → matmul_2。这段代码抽取了 Attention 计算的骨架,可以用最短的代码来研究 Attention 计算时触发了什么样的编译器优化(fusion、tiling、pipeline overlap)。
| 真实 Self-Attention | mini_attention |
|---|---|
Q, K, V = x @ Wq, x @ Wk, x @ Wv | h = x @ w1 — matmul |
scores = Q @ K^T / sqrt(d_k) | h = rms_norm(h) — normalize |
weights = softmax(scores) | h = softmax(h) — softmax |
output = weights @ V | out = h @ w2 — matmul |
编译流程概览#
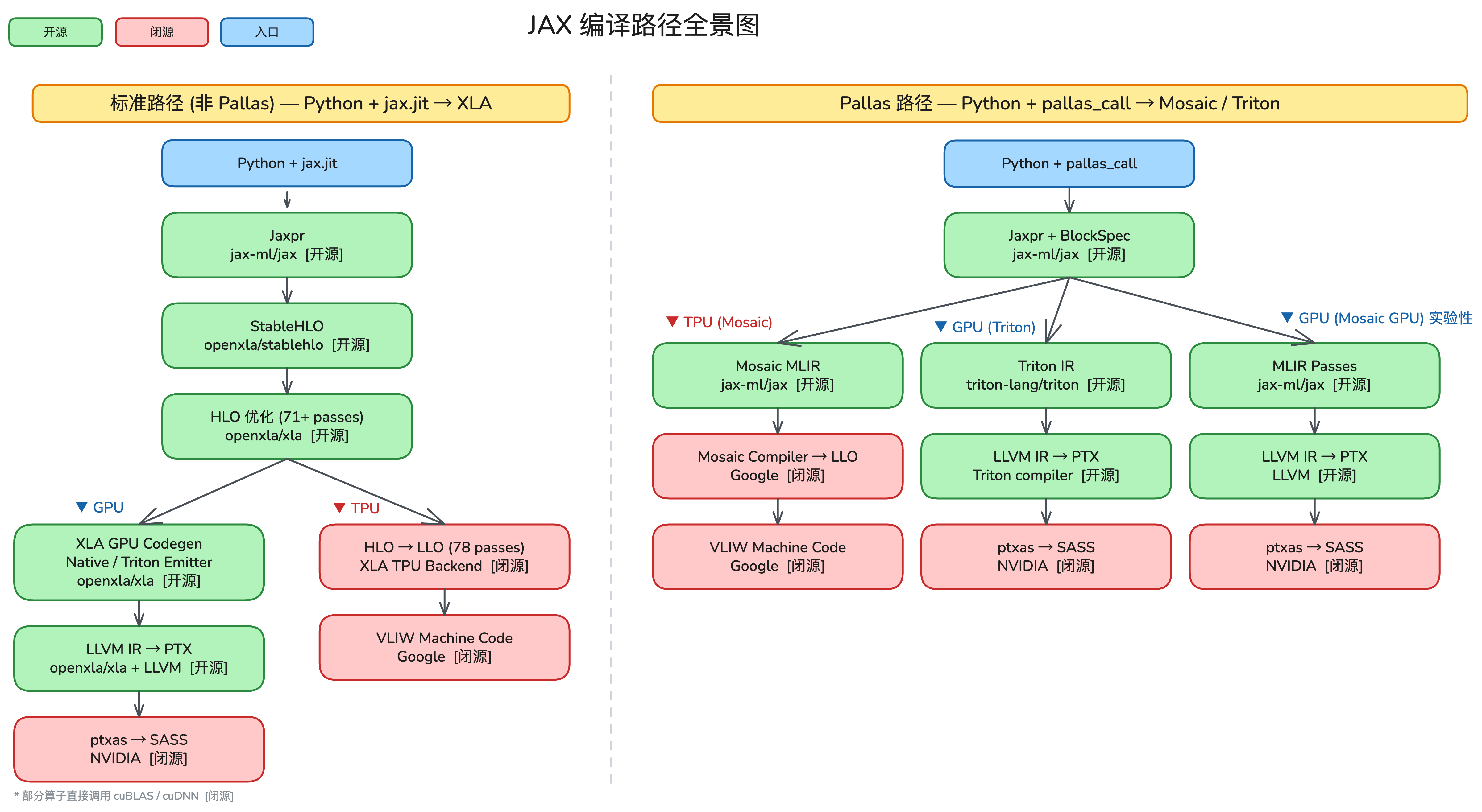
TPU 编译器会把这段代码先 trace 一次,变成 Jaxpr(通过 jax-ml/jax 实现,开源)。随后 Jaxpr 被编译成 StableHLO(通过 openxla/stablehlo 实现,开源),StableHLO 被优化成 HLO(通过 openxla/xla 实现,开源),HLO 被优化成 LLO(闭源),LLO 被打包成 VLIW(闭源)。
Python + jax.jit
│ ← tracing
Jaxpr
│ ← lowering
StableHLO
│ ← lowering
HLO
│ ← lowering (闭源 libtpu)
LLO
│ ← lowering (闭源 libtpu)
VLIW Machine Code展开:71+ HLO passes 和 78 LLO passes 是什么意思
这里的 “pass” 是编译器术语,指的是优化遍——编译器对 IR 做的一次转换/优化操作。
类比理解
就像写文章时的多轮修改:
第 1 遍:改错别字 → 编译器:常量折叠 (constant folding)
第 2 遍:删冗余段落 → 编译器:死代码消除 (dead code elimination)
第 3 遍:合并相似章节 → 编译器:算子融合 (operator fusion)
第 4 遍:调整段落顺序 → 编译器:指令调度 (instruction scheduling)
...
第 71 遍:最终润色 → 编译器:内存布局优化 (layout assignment)每个 pass 读入当前 IR,做一种特定优化,输出优化后的 IR。多个 pass 串联起来就是完整的编译流水线。
| 71+ HLO passes | 78 LLO passes | |
|---|---|---|
| 作用阶段 | HLO → 优化后的 HLO | LLO → 优化后的 LLO → VLIW |
| 抽象层级 | 高层,硬件无关 | 低层,TPU 硬件特定 |
| 典型优化 | 算子融合、代数化简、SPMD 分片 | 指令调度、寄存器分配、DMA 流水线 |
| 可见性 | --xla_dump_hlo_pass_re=.* 可 dump | --xla_jf_dump_llo_text=true 可 dump |
用 mini_attention 代码跑一下 dump,你会在 hlo/ 目录下看到类似这样的文件:
module_0001.jit_mini_attention.before_optimizations.txt ← 原始 HLO
module_0001.jit_mini_attention.006.algebraic_simplifier.txt ← 第 6 个 pass 后
module_0001.jit_mini_attention.015.fusion.txt ← 第 15 个 pass 后
...
module_0001.jit_mini_attention.071.after_optimizations.txt ← 最终 HLO每个文件就是一个 pass 执行后的 HLO 快照,可以对比前后差异,看编译器具体做了什么优化。
Insight:71 和 78 不是固定数字——pass 的数量会随 XLA/libtpu 版本和输入计算图的不同而变化。重点不是具体数字,而是理解编译器会做几十遍优化,每遍做一种特定变换。
HLO 优化#
Algebraic Simplifier(代数简化)#
// Before (pass #5)
%constant.6 = f32[] constant(64)
%broadcast.7 = f32[16,1]{1,0} broadcast(%constant.6), dimensions={}
%divide.18 = f32[16,1]{1,0} divide(%reshape.17, %broadcast.7)
// After (pass #6)
%constant = f32[] constant(0.015625)
%broadcast = f32[16,1]{1,0} broadcast(%constant), dimensions={}
%multiply = f32[16,1]{1,0} multiply(%reshape.17, %broadcast)除法在硬件上的开销很高,编译器提前计算 1/64 = 0.015625,把除法转换为乘法。
Layout Assignment(布局分配)#
Layout {1,0} 表示行优先存储顺序(row-major)。{1,0} 中数字越小的维度在内存中越连续:先遍历 dim 1(列方向),再遍历 dim 0(行方向),即 dim 1 在内存中连续 → 行优先。
展开:Layout {1,0} 与 Tiling :T(8,128) 详解
Layout {1,0} — 行优先存储顺序
{1,0} 表示维度的存储优先级:数字越小的维度在内存中越连续。
f32[16,64]{1,0}
│ │
│ └─ dim 0 (16行) 优先级 0 → 内存中最连续(外层)
└─── dim 1 (64列) 优先级 1 → 内存中次连续(内层){1,0} 意思是:先遍历 dim 1,再遍历 dim 0 → dim 1(列)在内存中连续 → 行优先(row-major)
具体内存布局(4×4 简化示例):
逻辑视图: 内存中的实际排列(行优先 {1,0}):
0 1 2 3 [0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15]
4 5 6 7 ├─ 第0行 ─┤├─ 第1行 ─┤├─ 第2行 ──┤├── 第3行 ──┤
8 9 10 11 同一行的元素在内存中紧挨着
12 13 14 15Tiling :T(8,128) — TPU 硬件对齐的分块
TPU 的 VPU(向量处理单元)硬件结构是 8 sublanes × 128 lanes:
VPU 硬件结构(一次能处理的数据块):
─────── 128 lanes ────────
lane0 lane1 lane2 ... lane127 sublane 0
lane0 lane1 lane2 ... lane127 sublane 1
... ...
lane0 lane1 lane2 ... lane127 sublane 7
= 8 × 128 = 1024 个元素,一拍处理完:T(8,128) 就是告诉编译器:把张量切成 8×128 的小块,每块刚好喂满 VPU 一次。
f32[16,64]{1,0:T(8,128)}原始张量 [16, 64] 加上 T(8,128) 后,编译器会这样处理:
tile(0,0): 8×128 (64列 实际数据 + 64列 padding 补零) 行 0-7
tile(1,0): 8×128 (64列 实际数据 + 64列 padding 补零) 行 8-15
列方向只有 64,不够 128 → 自动 padding 到 128为什么这么做
- 没有 tiling:VPU 要处理 [16,64] → 数据形状和硬件不匹配 → 需要额外的 reshape / padding → 慢
- 有 tiling
T(8,128):数据预先按 8×128 排列 → 每个 tile 直接塞进 VPU → 零开销,硬件满载运行
Insight:这就是为什么 TPU 上 tensor shape 最好是 128 的倍数——如果不是,编译器会自动 padding,浪费内存和计算。比如
f32[16]{0:T(128)}里 16 个元素要 pad 到 128,利用率只有 12.5%,而f32[128]{0:T(128)}利用率 100%。做 Pallas kernel 时选择 BlockSpec 的block_shape,也应该对齐到(8, 128)或其倍数。
Fusion 与 Multi-Output Fusion(融合与多输出融合)#
将局部的多个 HLO 操作融合到一个 op 里面。kind=kLoop 表示元素级融合;kind=kOutput 表示生产者与消费者的融合(生产者的产出立即被消耗)。
dot 变成了 convolution——TPU 编译器以这种方式规范化矩阵乘法,因为这两个操作映射到同一个 MXU 硬件。
当多个 fusion 共享一个共同操作数时,可以进一步合并。多输出融合(pass #43)识别具有共享输入的兄弟 fusion 并组合,返回 tuple。在此之前,输入归一化路径和均方根归约路径的 matmul 会在不同的 fusion 中各算一次。多输出融合会合并它们——matmul 只发生一次,归一化结果(convolution.3)和平方和(reduce.0)一起返回。否则要么重新计算 matmul,要么在 fusion 间将其溢出到 HBM。
Memory Space Assignment & Async Scheduling(内存空间分配与异步调度)#
最后一组 pass 将张量分配到特定内存空间,并插入异步存储操作。在 HLO 中,内存空间以 S(n) 标注:
S(0)(通常省略)— HBM(高带宽内存,片外)S(1)— VMEM(片上 SRAM)S(2)、S(3)等 — 额外的设备专用内存空间
注意参数一开始没有 S(1) 标注——它们存在于 HBM 中。copy-start / copy-done 配对是异步 DMA 操作,将数据从 HBM 搬到 VMEM。copy-start 返回的 tuple 包含目标缓冲区(在 S(1) 中)、源引用和同步令牌(在 S(2) 中)。
编译器将内存传输与计算重叠:
copy-start(w1)— 发起 w1 从 HBM → VMEM 的 DMA 传输copy-done(w1)— 等待传输完成,用于 matmul₁copy-start(w2)— 在 RMS norm 和 softmax 执行的同时,发起 w2 的 DMA 传输copy-done(w2)— 等待传输完成,用于 matmul₂
以上涵盖了 HLO 优化流程。到这一步,我们已经有了融合后的调度操作和内存标注——但仍然相对硬件无关。接下来,TPU 后端将每个 fusion 转换为 LLO(Low Level Operations),这一层直接映射到物理硬件单元。
LLO:从 HLO 到机器码#
TPU 硬件单元#
- MXU(Matrix Unit):两个 256×256 的脉动阵列(systolic array),用于矩阵乘法。FLOPS 的主要来源。
- VPU(Vector Processing Unit):处理 8 sublanes × 128 lanes 的元素级操作(add、mul、exp 等)。
- XLU(Transpose Unit):跨 lane 的 shuffle、转置和排列。
- Scalar Unit:标量操作、地址计算和控制流。
- DMA Engine:HBM 与 VMEM 之间的异步内存传输。
编译器要让 MXU、VPU、DMA 在同一个时钟周期内同时工作。
VLIW 架构是 TPU 和 GPU 的一个根本差异。GPU 靠大量线程来隐藏延迟(一个线程等数据时切换到另一个线程),硬件负责调度。TPU 靠编译器静态排好每一拍每个单元干什么,没有线程切换。这意味着 TPU 编译器的调度质量直接决定硬件利用率——排得好就满载,排得差就空转。这也是 libtpu 闭源部分的核心价值所在。
追踪 multiply_reduce_fusion#
让我们追踪 multiply_reduce_fusion——计算第一个矩阵乘法以及 RMS 归一化所需的平方和——如何从初始 LLO 转换为最终机器码。
编译器首先将 fused HLO region 转换为冗长且未经调度的 LLO 表示。矩阵乘法的开头如下:
$region0: #{multiply_reduce_fusion}
#allocation0 [shape = 'f32[1024]{0}', space=vmem, size = 0x1000, tag = 'scoped memory']
#allocation1 [shape = 'f32[16]{0:T(1024)S(1)}', space=vmem, size = 0x1000, tag = 'reduce buffer']
%s0 = inlined_call_operand.hbm [shape: f32[16,64], index: 0, kind: input]
%s1 = inlined_call_operand.vmem [shape: f32[64,64], index: 1, kind: input]
%s2 = inlined_call_operand.vmem [shape: f32[16], index: 2, kind: output]
%s3 = inlined_call_operand.vmem [shape: f32[16,64], index: 3, kind: output]编译器分配 VMEM 缓冲区,并确定操作数 0 来自 HBM,而操作数 1 已在 VMEM 中。这是一种多输出融合——同时产生 matmul 结果(%s3)和 RMS norm 的平方和(%s2)。
初始的 MXU 操作使用 vmatpush 将权重列加载到脉动阵列中:
%v63 = vld [vmem:[%s55] sm:$0xff]
%64 = vmatpush.bf16.msra.mxu0 %v63
...
%v93 = vld [vmem:[#allocation0] sm:$0xff]
%94 = vmatmul.bf16.gmra.mxu0 %v93
%v95 = vpop.f32.mrf.mxu0该序列以 bf16 精度通过 MXU 传输权重 tile,然后弹出累积的 f32 结果。
展开:Weight Tile 与 vmatpush 的工作原理
“Weight tile” 就是权重矩阵的一个分块。
MXU 是 256×256 的脉动阵列,但权重矩阵通常远大于此。所以编译器会把权重矩阵切成适合 MXU 尺寸的小块(tile),逐块送入计算:
权重矩阵 W [1024 × 1024]
| tile 0 | tile 1 | tile 2 | tile 3 |
| 128×128 | 128×128 | 128×128 | 128×128 |
| tile 4 | tile 5 | ... | ... |
| ... | ... | ... | ... |
每个 tile 大小匹配 MXU 能一次处理的维度vmatpush 做的事
vmatpush 是把一个 weight tile 的列逐列推入脉动阵列:
MXU 脉动阵列(简化为 4×4 示意)
vmatpush 第1列 → [w0][ ][ ][ ]
vmatpush 第2列 → [w0][w1][ ][ ]
vmatpush 第3列 → [w0][w1][w2][ ]
vmatpush 第4列 → [w0][w1][w2][w3] ← 权重 tile 加载完毕
然后 vmatmul:激活值从左侧流入 → 结果从底部流出
最后 vpop:取出累积的 f32 结果所以你看到的那行代码:
vmatpush3.bf16.msra.mxu0 %v61_v7 ← 把一个 bf16 权重 tile 推入 MXU
vpack.c.bf16 %v253_v14, %v85_v13 ← VPU 同时在打包下一个 tile 的数据
dma.done.wait [#allocation4], 256 ← DMA 同时确认下下个 tile 已从 HBM 搬到 VMEM三个硬件单元同时工作,形成流水线:MXU 在算当前 tile,VPU 在准备下一个 tile,DMA 在搬运再下一个 tile。
Insight:
vmatpush3中的3表示一次推入 3 列(而非 1 列),是vmatpush的优化版本,减少指令数量。这种"计算-准备-搬运"三级流水线就是 VLIW 的核心价值——编译器静态调度让所有硬件单元在每个时钟周期都有活干,不会闲等。
归约模式#
在 matmul 之后,我们需要对列的平方值求和。编译器使用 XLU(转置单元) 生成 cross-lane reduction:
%141 = vxpose.xlu0.b32.start [1/2] (short) /*vx=*/%v138, /*width=*/128
%142 = vxpose.xlu0.b32.end [2/2] (short) /*vx=*/%v140, /*width=*/128
%v143 = vpop.trf.xlu0
%v144 = vpop.trf.xlu0
...
%v158 = vpop.trf.xlu0 // 16 pops total转置后,树状归约将 16 条 lane 的数据相加:
%v161 = vadd.f32 0.0, %v143
%v165 = vadd.f32 %v161, %v144
%v169 = vadd.f32 %v165, %v145
...
%v221 = vadd.f32 %v217, %v158然后通过 sublane 旋转模式完成最终归约:
%v223 = vrot.slane %v221, 4 // rotate by 4
%v226 = vadd.f32 %v221, %v223
%v228 = vrot.slane %v226, 2 // rotate by 2
%v231 = vadd.f32 %v226, %v228
%v233 = vrot.slane %v231, 1 // rotate by 1
%v236 = vadd.f32 %v231, %v233这种经典的并行归约模式使用 log₂(n) 步——旋转 4、2、1——将 8 个 sublane 的值归约为单一标量。
展开:TPU 上归约求和的硬件实现
这段描述的是 TPU 上做归约求和(把很多数加成一个数)的硬件实现。分两个阶段,对应 VPU 的 8 sublanes × 128 lanes 结构。
第一阶段:跨 lane 归约(XLU 转置)
VPU 有 128 条 lane,数据分散在各 lane 里。问题是:每条 lane 只能访问自己的数据,不能直接读别的 lane。
XLU 转置单元就是用来解决这个问题的——它把数据在 lane 之间重新排列:
转置前(每条 lane 各持一个值): 转置后:
lane 0: [a] 向量1 = [lane 0-7 的数据]
lane 1: [b] 向量2 = [lane 8-15 的数据]
lane 2: [c] ...
... 向量16 = [lane 120-127 的数据]
lane 127: [x]vxpose → vpop.trf × 16 次,把 128 条 lane 的数据收集到 16 个向量里。
然后 16 个 vadd.f32 把这 16 个向量逐一累加 → 128 条 lane 的数据被加到了一起。
此时跨 lane 的求和完成了,但结果还分布在 8 条 sublane 上,每条 sublane 各持一个部分和。
第二阶段:跨 sublane 归约(旋转 + 加法)
这是经典的并行归约,和 CUDA shared memory reduction 的思路完全一样:
初始状态(8 条 sublane 各持一个部分和):
sublane: [0] [1] [2] [3] [4] [5] [6] [7]
值: a b c d e f g h
第 1 步: vrot.slane 4 → 旋转 4 位
原始: a b c d e f g h
旋转4: e f g h a b c d
vadd: a+e b+f c+g d+h ... ... ... ...
→ 8 个值变成 4 组部分和
第 2 步: vrot.slane 2 → 旋转 2 位
vadd: aceg bdfh ... ...
→ 4 组变成 2 组
第 3 步: vrot.slane 1 → 旋转 1 位
vadd: abcdefgh ...
→ 最终求和完成!sublane 0 持有全部 8 个值的和Insight:
log₂(8)= 3 步就能归约 8 个值——每步参与运算的数量减半(8→4→2→1),这就是并行归约的威力。这个模式和 GPU 上的 warp shuffle reduction(__shfl_xor_sync)几乎一模一样——都是"移位 + 加法"的树形结构,只是 GPU 移位发生在 warp 的 32 个线程之间,TPU 移位发生在 VPU 的 8 条 sublane 之间。两阶段分工清晰:XLU 负责跨 lane(硬件转置),VPU 负责跨 sublane(旋转+加法)——各硬件单元做自己最擅长的事。
VLIW Bundle 打包#
所有优化 pass 完成后,编译器生成 71 个紧密打包的 VLIW bundle。每个 bundle 将独立操作分组,在硬件单元间并行执行——编译器静态地将独立操作打包到固定宽度的 bundle 中,硬件在同一个时钟周期同时执行 bundle 内所有操作,无需运行时依赖检查。
0x9 : { %22 = dma.hbm_to_vmem [thread:$0] /*hbm=*/%s359_s0, ...
%v28_v1 = vlaneseq
%v301_v2 = vmov 0.0
%vm302_vm0 = vmmov 0
%v247_v4 = vld [vmem:[%s360_s1 + $0x30] sm:$0xff]
%v248_v5 = vld [vmem:[%s360_s1 + $0x38] sm:$0xff]
%v249_v6 = vld [vmem:[%s360_s1 + $0x20] sm:$0xff] }这单个 bundle 同时执行 7 项操作:1 项 HBM→VMEM 的 DMA 传输、1 条 lane 序列生成、2 项常量初始化和 3 项 VMEM 加载。
MXU 操作使用优化后的 vmatpush3 指令:
0xc : { %261 = vmatpush3.bf16.msra.mxu0 %v61_v7
%v89_v15 = vpack.c.bf16 %v253_v14, %v85_v13
%297 = dma.done.wait [#allocation4], 256 }三个并行操作:weight tile 推入 MXU,为下一次推送打包 bf16 值,以及 DMA 同步。bf16 后缀表示该 matmul 在 MXU 上使用 bfloat16 精度,吞吐量是 f32 的 2 倍。
matmul 结果提取使用掩蔽变体:
0x14 : { %269 = vmatmul.mubr.msk.bf16.vlgmr.msra.gmra.mxu0 %vm257_vm2, %v258_v18 }
0x15 : { %v95_v19 = vpop.f32.mrf.mxu0 }
0x16 : { %v98_v20 = vmul.f32 %v95_v19, %v95_v19
%105 = vst [vmem:[%s362_s3] sm:$0xff] /*vst_source=*/%v95_v19 }平方运算在 bundle 0x16 中立即发生,与存储 matmul 结果重叠——多输出融合允许我们对两个输出复用 %v95_v19。
展开:Bundle = VLIW 指令 = 一个时钟周期
一个 bundle = 一条 VLIW 指令 = 一个时钟周期。
一个 bundle(一个时钟周期内同时执行):
| MXU 指令 | VPU 指令 | XLU 指令 | DMA 指令 |
| vmatpush3 | vpack.bf16 | (空) | dma.done.wait |所以 71 bundles = 这个 fusion 从头到尾执行需要 71 个时钟周期(不算 DMA 等待等延迟)。
不同 fusion 的 bundle 数直接反映了计算复杂度——bundle 越多,执行时间越长。
Insight:Bundle 数量也是编译器优化效果的直接指标:同样的计算逻辑,如果编译器能更好地把 MXU/VPU/DMA 操作塞进同一个 bundle(而不是各占一个 bundle),总 bundle 数就会更少,执行更快。这就是编译器做 instruction scheduling(指令调度)的核心目标。你在 LLO dump 里看到的
0xc : { ... }这种格式,0xc就是 bundle 编号(十六进制),花括号里的所有指令在同一个周期并行执行。
展开:编译器如何优化 Bundle 数量
编译器优化的目标是两个维度:
- Bundle 数量越少 → 总时钟周期少 → 执行快
- 每个 Bundle 越满 → 硬件利用率高 → 没有浪费
差的调度(12 bundles,很多槽位空闲):
周期1: { vmatpush | (空) | (空) | (空) }
周期2: { (空) | vpack | (空) | (空) }
周期3: { (空) | (空) | (空) | dma.start }
...
好的调度(4 bundles,槽位尽量填满):
周期1: { vmatpush | vpack | (空) | dma.start }
周期2: { vmatpush | vadd | (空) | dma.wait }
...两者其实是一回事——把能并行的指令塞进同一个 bundle,总 bundle 数自然就减少了。
但有个重要限制:不是所有指令都能随意并行。比如:
- 指令 B 依赖指令 A 的结果 → 必须在 A 之后的 bundle
- MXU 每个 bundle 只能发一条指令 → 两个
vmatpush不能同周期 - DMA 传输有延迟 →
dma.start和dma.done.wait之间必须隔足够多的 bundle
所以编译器做的是在这些硬件约束和数据依赖下,找到最紧凑的排列。这就是 LLO 78 个 pass 中相当大一部分在做的事情。
Insight:这和 CPU 的乱序执行(out-of-order execution)解决的是同一个问题——指令级并行。区别是:CPU 由硬件在运行时动态调度,TPU 由编译器在编译时静态调度。TPU 把调度复杂度从芯片搬到了编译器,硬件更简单、功耗更低、面积更多留给计算单元。这也是为什么 TPU 编译器质量如此关键——CPU 上编译器调度差一点,硬件还能补救;TPU 上编译器排得不好,硬件就老老实实按低效顺序执行。
五个 Fusion 总览#
mini_attention 最终被编译器编译进 5 个 fusion,每个 fusion 都有自己的 LLO IR,产生不同数量的 VLIW bundle:
multiply_reduce_fusion(71 bundles) — 实现 matmul_1 和平方和归约,为 RMS 归一化做准备。MXU0 执行 bf16 matmul,VPU 立即计算平方值,XLU0 执行跨 lane 转置归约,DMA 从 HBM 流式传输输入激活数据。
add_sqrt_fusion(10 bundles) — 最简单的 fusion,计算 sqrt(mean + epsilon) 以实现 RMS 归一化。常数 0.015625(即 1/64)对应均值计算,vrsqrt.f32 指令计算倒数平方根。
fusion.5(56 bundles) — 计算跨行的 reduce_max,为 softmax 数值稳定计算做准备。模式类似求和归约,但使用 max 运算代替 add。
fusion.2(65 bundles) — 实现 exp(x - max) + reduce_sum,即 softmax 的分子和分母。vpow2 指令计算指数。
fusion(48 bundles) — 最终的 matmul_2,将 softmax 输出乘以值矩阵。比 multiply_reduce_fusion 小,因为是纯 matmul,没有额外归约。
TLP:顶层调度#
TLP(Top Level Program) 负责协调整个 mini_attention 的执行——编排所有五个 fusion 的调用顺序并管理数据流。
TLP 共 174 个 bundle(0x00-0xad),执行流程如下:
0x5f-0x65 : 程序入口和模式检查
0x66-0x7d : DMA: 从 HBM 加载权重矩阵 (copy-start)
0x7e-0x82 : 调用 multiply_reduce_fusion (matmul_1 + 平方和)
0x83-0x8d : DMA: 开始加载值矩阵 (copy-start.1)
0x8e-0x91 : 调用 add_sqrt_fusion (RMS norm 的 sqrt)
0x92-0x96 : 调用 fusion.5 (softmax 的 reduce_max)
0x97-0x9b : 调用 fusion.2 (softmax 的 exp + reduce_sum)
0x9c-0xa0 : DMA: 等待值矩阵传输完成
0xa1-0xa6 : 调用 fusion (matmul_2)
0xa7-0xad : 程序收尾DMA 编排#
TLP 仔细地将内存传输与计算重叠。首先加载第一个 matmul 的权重矩阵:
0x77 : { %26 = dma.hbm_to_vmem [thread:$1] /*hbm=*/%s10_s14,
/*size_in_granules=*/%s22_s17, /*vmem=*/%s24_s19,
/*dst_syncflagno=*/[#allocation8] }DMA 使用 thread:$1——TPU 拥有多个 DMA 引擎,允许并发传输。发起传输后,TLP 立即等待完成,然后调用第一个 fusion:
注意:这里的 “thread” 指的是 DMA 引擎的多个独立通道。TPU 的控制流是单线程的——只有一个 PC(程序计数器)顺序遍历 bundle 序列。但各硬件单元(MXU、VPU、DMA 各通道)是并行执行的,每个 bundle 只是在每个周期给它们各自下达命令。
0x7a : { %293 = dma.done.wait [#allocation8], 1024 }
0x7b : { %294 = vsyncadd [#allocation8], 4294966272 }
0x7c : { %39 = vsyncpa [#allocation8], 1 }
0x81 : { %45 = inlined_call %s9_s0, %s299_s1, %s300_s2, %s301_s3
/* %multiply_reduce_fusion = fusion(%Arg_0.1, %copy-done) */ }计算与通信 Overlap#
在 RMS norm fusion 运行时,TLP 开始加载第二个 matmul 的值矩阵:
0x8c : { %56 = dma.hbm_to_vmem [thread:$1] /*hbm=*/%s354_s25,
/*size_in_granules=*/512, /*vmem=*/%s54_s23,
/*dst_syncflagno=*/[#allocation13] }该 DMA 在 add_sqrt_fusion、fusion.5 和 fusion.2 执行时在后台运行:
0x90 : { %66 = inlined_call ... /* %add_sqrt_fusion */ }
0x95 : { %71 = inlined_call ... /* %fusion.5 */ }
0x9a : { %76 = inlined_call ... /* %fusion.2 */ }只有在最终 matmul 之前,TLP 才等待值矩阵传输完成:
0x9d : { %295 = dma.done.wait [#allocation13], 512 }
0xa5 : { %87 = inlined_call ... /* %fusion = final matmul */ }softmax 计算利用 double buffer 隐藏了数据加载的 latency。
Fusion 调用约定#
每个 fusion 调用都通过 inlined_call 传递 VMEM 缓冲区地址。例如最终的 matmul:
0xa2 : { %s312_s0 = smov [#allocation12] /* materialized constant */
%s355_s5 = sld [smem:[#allocation25_spill]]
%s356_s5 = int_to_ptr.hbm [resolvable:$false] %s355_s5 }
0xa3 : { %s313_s1 = smov [#allocation16] /* materialized constant */
%s314_s2 = smov [#allocation15] /* materialized constant */ }
0xa4 : { %s315_s3 = smov [#allocation11] /* materialized constant */
%s316_s4 = smov [#allocation14] /* materialized constant */ }
0xa5 : { %87 = inlined_call %s312_s0, %s313_s1, %s314_s2, %s315_s3, %s316_s4, %s356_s5
/* %fusion = fusion(%copy-done.1, %fusion.2, %fusion.5,
%get-tuple-element.1, %add_sqrt_fusion) */ }fusion 接收六个操作数:来自 HBM 的值矩阵(copy-done.1),以及所有之前 fusion 的中间结果。注意 #allocation25_spill——这是 scalar register 溢出到 SMEM(标量存储器),表明编译器的 scalar register 用完了,不得不暂时将一个值存到 SMEM。
寄存器溢出(register spill)会带来性能下降,应尽量避免。不过这里只是一个标量地址,数据量很小。每一级存储只会溢出到自己的下一级:register → SRAM → HBM。溢出的层级越深,性能开销越大。
Trace & Profiling#
在整个执行过程中,TLP 会插入 trace marker:
0x78 : { %30 = vtrace 2415919104 } // After copy-start
0x82 : { %49 = vtrace 2415919106 } // After multiply_reduce_fusion
0x91 : { %69 = vtrace 2415919108 } // After add_sqrt_fusion
0x96 : { %74 = vtrace 2415919109 } // After fusion.5
0x9b : { %79 = vtrace 2415919110 } // After fusion.2
0xa6 : { %90 = vtrace 2415919112 } // After final fusion这些 trace ID 使 TPU profiling 工具能够测量每个 fusion 所花费的时间,帮助识别性能瓶颈。
TLP 以同步结束:
0xa9 : { %95 = vsettm %s317_s26 } // Set timer mode
0xaa : { %96 = vdelay 1 } // Delay for pipeline drain
0xab : { %97 = sfence } // Memory fence
0xac : { %s318_s27 = smov 0 }
0xad : { %98 = sst [smem:[#allocation17]] %s318_s27 } // Signal completionsfence 确保所有内存操作在向 host 发出完成信号之前全部完成。
总结#
本文通过追踪 HLO/LLO,展示了编译器如何将 8 行 JAX 代码编译为 250 条 VLIW bundle 指令。
具体来说,编译器通过 trace 整张计算图实现了 op 间的 fusion,并将 MXU/VPU/DMA/VMEM/SMEM 等硬件的指令捆绑打包,自动 overlap DMA 和计算操作。用户不需要手动做 shared memory 管理,不需要调用 @triton.autotune,不需要手动写 tiling 逻辑——这一切发生的起点,只有一行 @jax.jit。
通过编译器优化,TPU 给用户提供了更高的下限,但在某种程度上损失了灵活性——它的上限低于手动精调的 GPU kernel。在编译器做得不够好的时候,我们需要通过 Pallas 实现 kernel,从而手动控制硬件,做好 pipeline 的 overlap,来更好地压榨硬件。
核心要点:
- Fusion 是优化的核心,减少 HBM 数据搬运,将计算尽量保持在 SRAM 上
- DMA 通过 double buffer,将数据搬运隐藏到计算中
- VLIW 将多个独立 op 打包成一条指令,TLP 调度这些 fusion 的执行并管理数据 pipeline
- HLO 很好读懂,LLO 需要熟悉一些关键字:
vmatpush、vmatmul、vxpose、vpop.trf、vrot.slane等 - 编译器源码是闭源的(libtpu),但通过 dump 出来的 IR,你依然能看懂编译器做了什么
本文大量参考了 From JAX to VLIW: Tracing a Computation,并增加了一些自己作为新手的理解,感谢大佬分享。